![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

Dernière mise à jour: 30 janvier 2024
Code OTAN Victor I
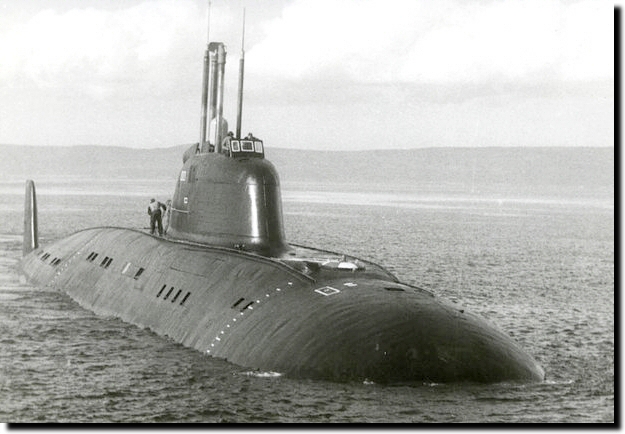
La première génération de sous-marins nucléaires soviétiques (classes 627, 627A Kit / November, 645) avait été conçue avant tout pour la lutte anti-surface. Mais, dans la seconde moitié des années 50, le besoin de disposer de sous-marins plus orientés vers la lutte ASM s'est fait sentir pour:
- mener la lutte contre les SNLE de l'adversaire probable sur leur zone de patrouille, en mer libre ou sous les glaces
- soutenir le déploiement de sous-marins soviétiques, en harcelant les forces ASM de l'adversaire, notamment aux frontières de ses barrières ASM fixes
- assurer la protection des convois maritimes militaires et civils.
Dans cette approche, les autorités soviétiques n'écartaient pas les missions traditionnelles dévolues aux sous-marins lance-torpilles (lutte anti-surface, avec l'attaque des porte-avions, l'attaque des voies de communication maritimes, le mouillage de mines...).
Le 28 août 1958, les autorités moscovites se sont prononcées en faveur d'une conception unique des installations de génération de vapeur des futurs sous-marins nucléaires. Sensiblement à la même époque, le Comité d'État à la Construction Navale (GKSN) a lancé un concours pour quatre nouveaux modèles de sous-marins nucléaires, les projets 667, 669, 670 et 671. Trois bureaux d''ingénierie y prirent part: le TsKB-18, le SKB-112 «Sudoproekt» et le SKB-143, SPMBM «Malakhit» après 1974. Ce dernier remporta la première place haut la main pour le projet 671. Il avait déjà dessiné auparavant toute une série de sous-marins nucléaires:
- la classe 627, premier sous-marin nucléaire soviétique, le «Leninskiy Komsomol»
- la classe 645, dont le circuit primaire utilisait un métal liquide comme fluide caloporteur
- le projet P627A, lance missiles aérodynamiques de longue portée (non réalisé)
- le projet 639, armé de trois missiles balistiques (non réalisé)
Tous ces projets n'avaient pas abouti, mais les travaux d'étude avaient fait éclore une véritable école de conception. Les projets que ce Bureau proposa pour ce concours présentaient plusieurs caractéristiques communes:
- une hydrodynamique très poussée, fruit d'une collaboration avec le bureau moscovite du TsAGI, optimisée pour la navigation sous-marine
- une ligne d'arbre unique
- l'utilisation d'un courant force alternatif triphasé
- une coque épaisse de grand diamètre permettant une disposition transversale des réacteurs nucléaires de 2ème génération, leur nombre dépendant de la puissance demandée.
Par contre, ces projets ne prenaient pas position sur la réserve de flottabilité.
En décembre 1958, les instances gouvernementales soviétiques ratifièrent le plan à sept ans (1959 – 1965) de conception et de construction de sous-marins nucléaires. Il incluait un sous-marin ASM de taille moyenne, armé de torpilles et équipé d'un système acoustique perfectionné (classe 671, dénommé Yorsh [en français Grémille, variété de perche]). La conception en était confiée au SKB-143, et la construction aux Chantiers de l'Amirauté à Leningrad (Chantier n° 196).
Les délais, quelque peu accélérés, étaient ainsi fixés:
- cahier des charges opérationnel 3 novembre 1959
- projet préalable mars 1960
- projet technique décembre 1960.
Les sous-marins de la classe 671 devaient pouvoir mener leur mission sur toutes les mers du globe, et avant tout en Océan Glacial Arctique. Mais la limitation du tonnage à 2000 t posa de sérieuses difficultés aux ingénieurs. Les sous-marins devaient être construits aux Chantiers de l'Amirauté de Leningrad, avant d'être transportés vers le nord sur une barge, par le canal à faible gabarit de la mer Blanche.
L'immersion était fixée à au moins 300 m. Un sonar puissant, dont la taille était pour la première fois spécifiée, devait devenir une des caractéristiques du projet.
Près de 20 variantes ont été étudiées, présentant diverses combinaisons d'équipement, du nombre d'hélices, avec plusieurs modèles d'installations nucléaires, de générateurs électriques. Une attention toute particulière a été apportée à la réserve de flottabilité, qui était fixée à au moins 16 % et qui devait rester positive même en cas de l'envahissement de l'un des compartiments.
Les premières études ont permis de formuler les principes de base ci-après:
- une seule ligne d'arbre, assurant un haut rendement de l'hélice et un bruit rayonné minimal, disposition que le commandant en chef de la Marine, l'amiral Gorshkov n'a accepté qu'à titre «exceptionnel»
- une forme de coque optimisée pour la navigation sous-marine
- un diamètre de coque important, avec l'installation de la turbine de propulsion et des turbo-alternateurs dans un seul compartiment
- la fusion de deux compartiments « classiques» (local torpilles et locaux-vie) en un seul, et dans lequel s'insérait maintenant la base du sonar.
Sous la pression des ingénieurs, la marine a renoncé à son exigence de flottabilité positive en cas d'envahissement d'un compartiment.
L'installation nucléaire de production d'énergie devait assurer à la plate-forme un avantage de vitesse sur les sous-marins de l'adversaire potentiel. Une vitesse d'au moins 30 noeuds paraissait nécessaire, ce qui rendait évident que la limitation de tonnage devenait difficile à tenir, à l'instar de ce qui s'était produit pour la classe 627. Les ingénieurs adoptèrent une installation développant un total de 31 000 CV. Elle se composait de deux ensembles de production de vapeur, chacun avec un réacteur à eau pressurisée VM-4 de 72 MW et de deux générateurs de vapeur PG-4t indépendants. Le rechargement des coeurs était prévu selon un cycle de huit ans.
La configuration générale de l'installation était très différente de celles de la 1ère génération. Quoique le concept de boucle ait été conservé, le volume occupé était beaucoup plus faible, en particulier pour le circuit primaire. On utilisa un schéma «tube dans tube» et les pompes du circuit primaire furent installées sur les générateurs de vapeur. Le nombre de collecteurs de grand diamètre reliant les principaux composants de l'installation (filtres du circuit primaire, pressuriseur ...) a été réduit. Le circuit primaire a été en quasi-totalité installé derrière une protection radiologique. Appareils de mesure et de télécommande ont beaucoup évolué: le nombre d'apparaux manoeuvrés à distance a été accru, et les distances de télécommande augmentées. Le pupitre de contrôle des réacteurs était installé dans un local particulier de la 4ème tranche.
Le compartiment des turbines incluait le groupe turbo-réducteur principal, ainsi que deux turbo-alternateurs autonomes OK-2, installés sur une dérivation du collecteur principal. Ces derniers assuraient la production de courant alternatif triphasé à 380 Volt 50 Hertz, pour la première fois sur un sous-marin nucléaire soviétique. Ils regroupaient une turbine et un alternateur TMV-2-2 de 2000 kW. Ces turbo-alternateurs étaient indépendants, et non pas attelés au groupe moto-propulseur, comme pour la génération précédente.
Deux batteries d'accumulateurs acide – plomb du type 426-11 étaient installées (112 éléments chacun, 8000 A/h), ainsi que deux Diesel alternateurs MSK-103-4 (200 kW, 400 V, 50 Hz). Le courant continu était obtenu au travers de deux redresseurs PR-501 Elektrosil de 500 kW chacun.
La gestion des sources d'énergie électrique et de sa distribution était assurée depuis un pupitre principal (EES), grâce au système Baïkal.
La propulsion de secours était assurée par deux moteurs électriques à courant continu PG-137 d'une puissance unitaire de 275 CV (375 ?) entraînant chacun une hélice bipale de petit diamètre, par l'intermédiaire d'une ligne d'arbre traversant le stabilisateur horizontal correspondant. D'autre systèmes de propulsion auxiliaire avaient été étudiés, comme les hydrojets. Mais leur complexité et leur niveau de bruit à cette époque n'ont pas permis d'aller plus avant dans cette option.
Tous les principaux systèmes disposaient d'automates et de télécommandes. Dès le départ du projet, le choix d'une automatisation maximale avait été fait pour:
- la gestion centralisée des réglages et des sécurités de l'installation nucléaire (SUZ-671 SYaS) avec pupitre RUZ-671
- la gestion du sous-marin dans son espace d'évolution, des manoeuvres de stabilisation automatique (ShchPAT), de sa profondeur d'immersion en route ou sans erre, la possibilité de télécommander route et immersion
- la gestion automatisée des moyens de lutte contre les sinistres et assurer la stabilité du bâtiment (système Tourmaline)
- la gestion de tous les systèmes du sous-marin (OKS)
C'est la première fois qu'un tel système contrôlant plus de 220 équipements et faisant appel à plus de 500 senseurs répartis dans tout le bord était installé sur un sous-marin. Son élaboration avait donné lieu à un concours entre le TsINI-45 et l'OKB-781. C'est le projet de ce dernier qui sera retenu, sous le nom de VOLFRAM.
L'installation dans la partie avant du sous-marin de l'imposant système acoustique et des tubes lance-torpilles a été délicate. La difficulté résidait dans l'installation dans la partie avant d'une masse de 20 t pour un volume de 68 à 70 m3. Si le cahier des charges prévoyait à l'origine l'installation du sonar « Kerch» , le responsable du projet prit la décision d'installer le nouveau sonar «Rubin», de meilleures performances. Il offrait une distance maximale de détection de 50 à 60 km. Il regroupait l'émetteur basse fréquence, l'antenne HF du sonar anti-mines MG-509 «Radian» placée sur l'avant, le téléphone sous-marin, les systèmes de signalisation acoustique et toute une série de composants. Le «Rubin» assurait une veille omnidirectionnelle, la poursuite automatique, la détermination de la route des cibles, des mesures de distance (en mode actif), ainsi que la détection des moyens ASM actifs de l'adversaire.
Le sous-marin était équipé du système de navigation SIGMA, permettant de naviguer sous toutes les latitudes. Il permettait aussi de fixer le cap et d'enregistrer la position. Il disposait aussi d'un système de télévision capables de fournir des images jusqu'à une profondeur de 50 m, en mer libre ou sous la glace.
Les dispositifs rétractables comprenaient:
- le périscope PZNS-10
- l'antenne du système MRP-10 Nakat d'identification radio-électronique et son répondeur
- l'ensemble radar MRK-101 Albatros
- une antenne de télécommunications VAN-M ou ANIS ou IVA
- le radio-goniomètre ZAVESA
- le schnorchel
Des emplacements étaient prévus pour toute une série d'antennes installées en fonction de la mission.
La position des tubes lance-torpilles a donné lieu à d'autres études. On avait imaginé de les placer selon la disposition adoptée par l'US Navy, avec des tubes divergents, et plus proches du centre du sous-marin. Mais ceci obligeait à réduire la vitesse du sous-marin au moment du lancement, à une vitesse inférieure à 11 noeuds, inacceptable en lutte anti-surface. Ce schéma compliquait également les opérations de chargement à quai, et rendait quasi-impossibles les opérations de rechargement des tubes à la mer. On revint donc au schéma classique avec les tubes à l'extrémité avant. L'ensemble occupait le tiers supérieur du premier compartiment, les tubes répartis en deux rangées horizontales. Au dessus de la rangée supérieure, la trappe de chargement des torpilles se situait dans l'axe du navire. Elle était protégée par une porte par laquelle la grue de chargement passait la torpille. Une telle structure a permis de simplifier le processus du chargement, sans nécessiter d'effort physique particulier de la part de l'équipage, tout en le rendant moins complexe et moins dangereux. La torpille était introduite dans le 1er compartiment, chargée sur l'appareil de manutention et poussée sur le berceau par des vérins hydrauliques. Conçu par le TsKB-18, ce système, connu sous le nom de "KIPARIS" a été installé par la suite sur les sous-marins des projets 671RT, 671RTM et 971.
Les six tubes lance-torpilles de 533 mm autorisaient le lancement jusqu'à l'immersion de 250 m. La capacité d'emport était de 18 torpilles (6 dans les tubes) ou 36 mines (12 dans les tubes). Le mouillage de mines pouvait s'effectuer jusqu'à la vitesse de 6 noeuds.
Les spécialistes du TsKB Polyus ont conçu la nouvelle direction de lancement de torpilles numérique "LADOGA" .
L'équipement du sous-marin d'un circuit HP avec des compresseurs EK-30A a accru la survavibilité du sous-marin. Le projet a aussi vu la ré-apparition de vannes Kingston sur les ballasts principaux. On ne pouvait prévoir qu'il s'agissait d'un choix judicieux, puisque les tragédies des sous-marins K-8 (projet 627A) et K-278 Komsomolets (projet 685) n'avaient pas encore eu lieu. Elles seront partiellement causées par l'absence d'un dispositif de ce type. Les manoeuvres manuelles ont été réduites au profit d'un système de télécommandes centralisées. De nouvelles pompes de vidange et de drainage ont été installées. Des tuyautages en alliage de titane ont aussi fait leur apparition. Le système hydraulique présentait une forte évolution par rapport à celui des sous-marins nucléaires de première génération.
Une nouvelle gamme de filtres a été créée pour le maintien de la qualité de l'air. La protection radiologique a été renforcée. Et les ingénieurs poussèrent à l'adoption d'un générateur électro-chimique de l'air (EkhRV), qui valut le prix Lénine à ses concepteurs. Il sera installé par la suite sur les sous-marins d'autres bureaux (670, 667 ...).
Le cahier des charges définissait une profondeur d'immersion de 400 m, à comparer aux 300 m du projet 627. La coque épaisse était réalisée en acier AK-29, élaboré par le TsNII 48, avec une épaisseur de 35 mm. En parallèle, on étudia la possibilité de sa fabrication en alliage haute résistance de titane. Mais le manque d'expérience sur leur utilisation leur a fait préférer l'acier AK-29. La coque épaisse se composait d'anneaux cylindriques et de deux troncs de cône. Les couples étaient placés à l'extérieur, sauf pour la partie arrière. Les cloisons intérieures de la coque épaisses étaient calculées pour résister à une pression de 10 kg/cm2. Elles divisaient la coque en sept compartiments étanches:
1er: torpilles, accumulateurs, base sonar et locaux vie
2ème: poste central, mécanismes et auxiliaires
3ème: réacteurs nucléaires
4ème: groupe turbo-réducteur, turbo-alternateurs et pupitre de contrôle des réacteurs
5ème: équipements électro-techniques, mécanismes auxiliaires et les sanitaires
6ème: locaux vie et Diesel-alternateurs
7ème: appareil à gouverner, moteurs de propulsion auxiliaire et coquerie.
Le revêtement du pont et du kiosque était réalisé en alliage AMg-61 (aluminium – magnésium?), à faible signature magnétique. On ne préféra pas renouveler la triste expérience de l'alliage d'aluminium du projet 629. Le revêtement a surmonté l'épreuve du temps grâce à une protection efficace et à la peinture. Le dôme sonar et les barres de plongée étaient réalisées en alliage de titane.
Comme demandé par la décision gouvernementale, le projet préalable a été achevé en mars 1960.
Il était ainsi décidé que le projet:
- disposerait de six tubes lance-torpilles de 533 mm en proue
- emporterait 18 torpilles
- plongerait à 400 m
- disposerait:
d'une installation énergie de 31 000 Cv,
de deux turbo-alternateurs de 2000 kW unitaire
de deux groupes auxiliaires de propulsion de 250 (350?) Cv
aurait un déplacement de 3300 tonnes.
Ce projet préalable était ratifié par le Comité d'État à la Construction Navale et la Marine le 29 juillet 1960. Les équipements suivants étaient retenus:
- sonar MGK-300 RUBIN du TsNII MORFIZPRIBOR. Il regroupait le transducteur basse fréquence placé à l'avant, l'antenne haute fréquence du sonar anti-mines MG-509 «Radian» ,
- direction de lancement de torpilles numérique Ladoga-2
- centrale de navigation Sigma
- système de tenue de cap et d'immersion ShPAT-671
- système de lutte contre les sinistres Turmalin-671
- système de contrôle centralisé Volfram-671, assurant le contrôle de l'immersion, la gestion de l'air HP, de l'assèchement, de la ventilation du conditionnement d'air, de l'hydraulique etc...
- système Kiparis de préparation et de chargement rapide des torpilles
- système EkhRV de régénération électro-chimique de l'air
De plus, le sous-marin devait disposer d'un système de filtrage et de conditionnement de l'air, de l'éclairage fluorescent. L'agencement des locaux devait être plus rationnel et plus moderne que sur les sous-marins nucléaires de la 1ère génération.
Il a conservé l'architecture et les principes d'agencement du projet préalable. Cette phase s'est attachée à la réduction du niveau de bruit, ainsi qu'aux travaux d'installation du sonar. Ces domaines conditionnaient en effet les performances du futur sous-marin. Mais ils ont été contrariés par l'accroissement du déplacement qui a fini par passer à 3750 t. Il a été achevé en décembre 1960, et ratifié par la Marine et le GKSN le 4 mars 1961. Il sera entériné par les instances gouvernementales par la suite.
En juillet 1961, les Chantiers de l'Amirauté ont entrepris la construction d'une maquette d'aménagement à l'échelle 1, en suivant les plans du SKB-143. Cette maquette a été utilisée pour établir avec précision la disposition des équipements, les passages de câbles et de canalisations, et pour dresser les plans pour les ouvriers des chantiers. Il faut souligner que 60 des 480 équipements n'avaient pas encore de spécification figée. C'était notamment le cas des turbo-alternateurs, des centrales aéroréfrigérantes, de convertisseurs ...
Les essais de démarrage ont débuté en juillet 1966. Ils se sont prolongés suite à une série d'incidents, sur l'isolation des générateurs de vapeur, les filtres absorbants des condenseurs, les pompes de circulation du circuit primaire....
Ce n'est qu'en juillet 1967 que le sous-marin a été transféré à la base d'achèvement de Severodvinsk sur une barge. Les essais constructeurs s'y achevèrent dans les derniers jours d'août, suivis par les essais officiels d'une durée de 25 jours. Mais le premier sous-marin du projet entra en service sans son revêtement anéchoïque. Il devait pendant un temps détenir le record du monde officieux de vitesse pour un sous-marin en plongée, avec une vitesse de 34,5 noeuds atteinte au cours des essais.
Les essais d'immersion profonde ont été réalisés par la troisième unité du projet (K-147, n° de construction 602), conformément à une décision commune de la Marine et du Ministère des Constructions Navales (MSP). Pour cela on installa sur le sous-marin des capsules de sauvetage, et il fut raccordé à une bouée relais destinée à soutenir les canalisations d'air HP de secours. Ces essais démontrèrent que la coque épaisse et les systèmes assuraient parfaitement leurs fonctions jusqu à la profondeur limite de 400 m.
Les sous-marins étaient construits au chantier Sudomekh de Leningrad (nef n°12), puis transférés à Severodvinsk à bord d'un dock spécialisé, le TPD-4 de la classe 1753, par le canal de la mer Blanche.
48 unités étaient prévues, mais la décision de la construction d'une version modernisée était déjà prise dès 1963.
La période d'entretien entre deux missions était fixée à 90 jours.
Les sous-marins du projet 671 ont navigué sur tous les théâtres où la stratégie soviétique l'a demandé. Ils ont présenté de grandes qualités pour le recueil de renseignement et les patrouilles opérationnelles. Douze sous-marins du projet ont été affectés à la Flotte du Nord. D'abord basés à Zapadnaya Litsa, ils ont été transférés à Gremikha entre 1981 et 1983. Trois ont rejoint la Flotte du Pacifique.
En Méditerranée, les déploiements ont pratiquement atteint 90 jours, à comparer aux 60 jours d'autonomie en vivres prévue à l'origine. L'anecdote la plus fameuse est celle du message du K-367 annonçant que sa position était celle l'ancre du porte-avions USS Nimitz, naviguant au large de l'Italie.
En océan Indien, deux sous-marins ont fait face à une cinquantaine de navires américains lors la tension entre les États-Unis et l'URSS en 1979. Les K-38 et K-481 disposaient de deux équipages chacun. Les relèves étaient assurées à partir du bâtiment base Berezina, alors stationné à Aden ou à Socotra. La température de l'eau atteignant 40° en surface faisait monter celle des locaux énergie jusqu'à 70°, tandis qu'elle atteignait jusqu'à 50° dans les locaux vie. Les sous-marins devaient plonger en dessous de 60 m pour trouver une température de 10 à 15°. Les forces ASM américaines ont eu beaucoup de mal à obtenir des contacts, et lorsqu'elles en ont obtenus, ils étaient trop fugitifs pour pouvoir être classés. Les sous-marins leur échappaient aisément en plongeant plus profondément, mais ils arrivaient toujours à rester en portée de lancement.
En septembre et octobre 1971, les K-38 et K-323 ont mené une mission sous la banquise arctique.
En janvier 1974, deux sous-marins des projet 670 et 671 ont effectué un transit entre flotte du Nord et flotte du Pacifique, qui a duré 107 jours. Ils ont traversé l'océan Atlantique, puis l'océan Indien avant d'atteindre l'océan Pacifique. Après une courte escale à Berbera (Somalie) du 10 au 25 mars, ils sont détectés le 29 mars par les forces ASM américaines auxquelles ils ont échappé en plongeant plus profond. Le 13 avril, ils se sont présentés en surface à l'entrée du détroit de Malacca, derrière le "Bachkiriya". La température de l'eau en surface a rapidement dépassé 28° , et l'humidité 90%. Les forces ASM américaines se sont rapidement manifestées avec des avions de patrouille maritime "Orion" puis des hélicoptères. Le 20 avril, le sous-marin du projet 671 a connu un début d'incendie dans l'installation du sonar Rubin, vite maîtrisé par l'équipage. Le 7 mai, les deux sous-marins étaient à Avachinskaya Guba.
A partir de janvier 1976, le K-469 a effectué le transit flotte du Nord - flotte du Pacifique via le détroit de Drake, en compagnie du K-171 (projet 667B Murena / Delta 1) avec lequel il restera à portée de téléphone acoustique. Le transit s'effectue en plongée pendant les 80 jours du voyage, le K-469 ne reprenant qu'une fois la vue au large de l'Antarctique. Après le dernier passage de l'équateur, ils rejoignent indépendamment le Kamchatka, ayant parcouru 21 754 nautiques.
En Atlantique, le K-147, équipé du système de pistage non acoustique passif SOKS a effectué une mission APORT entre le 29 mai et le 1er juillet 1985, dans le cadre de la stratégie mise en oeuvre par la flotte du Nord. Il a ainsi a pu pister pendant plus de six jours le SNLE américain "SIMON BOLIVAR" de la classe LAFAYETTE, à l'aide de ses systèmes acoustiques et non-acoustiques.
L'évènement le plus spectaculaire s'est déroulé dans le Pacifique. En mars 1984, le K-314 assurait le pistage du groupe du porte-avions américain Kitty Hawk, en compagnie du bâtiment ASM Vladivostok. Le 21 mars, lors d'une reprise de vue, le sous-marin est entré en collision avec le porte-avions, ouvrant une brèche de plus de 40 m de long dans la coque de ce dernier. Le porte-avions a été contraint de rentrer au Japon, pour passer au bassin. Le K-314, de son côté, son hélice endommagée, a été remorqué jusqu'à Chazhma. La presse spécialisée américaine s'est déchaînée, puisqu'un tel événement mettait crûment en lumière l'insuffisance des moyens ASM.
Au sein de la 3ème diviziya de la 1ère flottille de flotte du Nord, ils ont accompli plus de 150 missions opérationnelles.
Le K-314 a été le premier sous-marin du projet 671 à être retiré du service le 14 mars 1989, en Flotte du Pacifique, suite à un accident radiologique. Les suivants l'ont été entre 1993 et 1996.
Plusieurs équipages, en plus des équipages en titre, ont oeuvré à bord de ces bâtiments dont les 89, 91, 166, 289, 313, 343 et 462
Parmi les défauts constatés sur cette série, on peut citer les avaries des pompes de circulation du circuit primaire, les fuites sur les générateurs de vapeur, des fissures de la coque épaisse, la perte d'isolation des antennes radio, les performances insuffisantes du sonar, bruit rayonné élevé provoqué notamment par l'absence d'amortisseur entre le groupe turbo-réducteur et la coque épaisse...
![]()